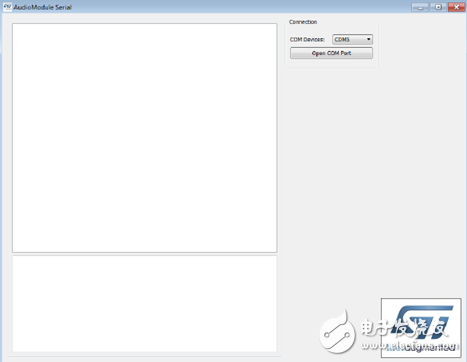
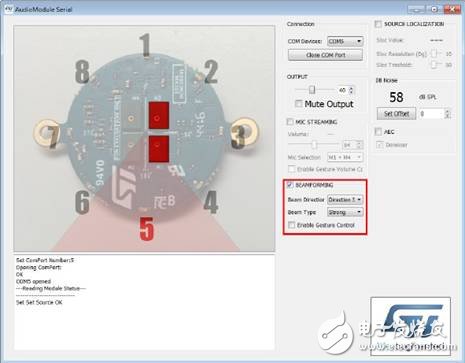
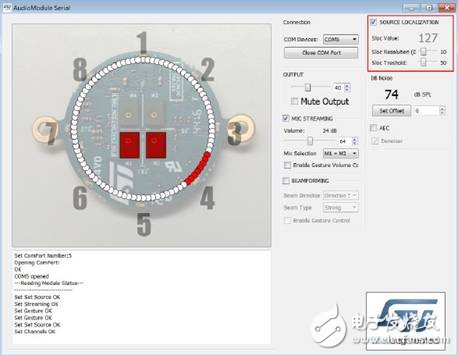
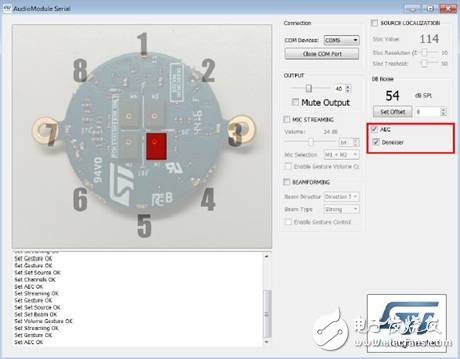
I introduced the BlueCoin micro development board kit. Here I will introduce the software packages used by BlueCoin , as follows: 1. STSW-BCNKT01 : Embedded software demo , the main functions include obtaining data through USB and BLE , saving log data to SD card, gesture recognition, audio capture and playback. 2. FP-SNS-ALLMEMS1 : MEMS sensor evaluation software package, the main demonstration functions include IoT node BLE interconnection, digital microphone, environment and motion sensor, audio middleware algorithm library. 3. FP-AUD-SMARTMIC1 : Intelligent audio input and output software expansion package, including MEMS microphone acquisition, advanced audio processing (including Beamforming , SL , AEC ), and audio output. 4. FP-AUD-BVLINK1 : Mainly introduces BlueVoice to transmit half-duplex voice data stream through BLE . BlueCoin has built-in FP-AUD-SMARTMIC1 firmware by default . This article first introduces its use and functions. Operation steps : 1. BuleCoin core board main expansion board inserted into the above 2. Connect the BlueCoin kit to the PC via the Micro-USB cable . If the PC is a Win7 system, you need to install the driver. The driver is in the Utilities\Windows_7_Driver path of the FP-AUD-SMARTMIC1 package . Right-click on the device with a yellow exclamation point, select the driver for the specific path, and update it. Note : After connecting the USB cable to the PC , the LED near the STlogo position lights up, indicating that BlueCoin is working properly. 3. Open the FP-AUD-SMARTMIC1 GUI software, located in Utilities\PC_Software\Control_SW_Executable , select the COM port to open, you can use the related functions of FP-AUD-SMARTMIC1 . Main features : 1. Beam forming . The beamforming algorithm uses the audio data acquired by two of the microphones to form a virtual microphone that points in a particular direction. Note : If the “Enable Gesture Control†option is checked , the algorithm will use the two ToF Sensors onboard to recognize the user's gesture movement. Assuming the hand moves from right to left (direction 3 to 7 ), the algorithm will change the beam direction to 7 . 2. Soundsource localization . The sound source localization algorithm uses the audio data acquired by the four microphones to determine the approximate direction of the primary sound source. Note : The red circle in the above figure indicates the direction of the sound source judged by the algorithm. 3. Acousticecho cancellation (AEC) . The speaker will play a song stored in the MCUflash to simulate the far-end sound signal. The algorithm collects the audio data of the microphone 1 , and then uses the echo cancellation algorithm to remove the sound of the song in the data. 1000-1500 Kw Marine Diesel Engine 1000-1500 Kw Marine Diesel Engine,Oil Drilling Machine,Drilling Oil Gas Rig,Drilling Oil Rig Engine Jinan Guohua Green Power Equipment Co.,Ltd. , https://www.guohuagenerator.com

November 20, 2022