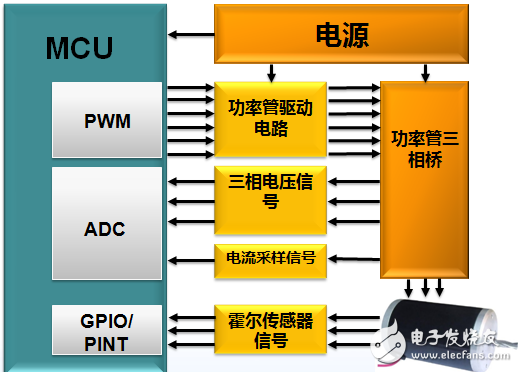
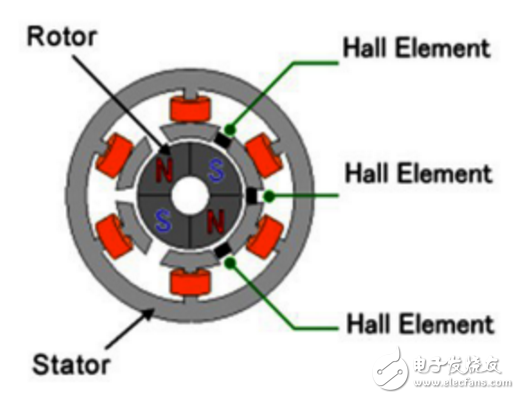
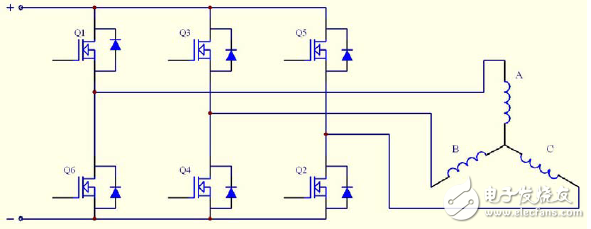
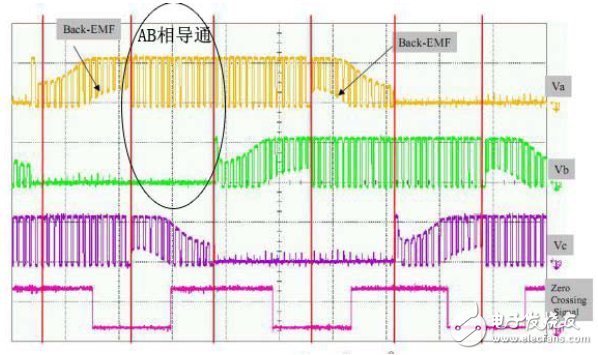
As a "newcomer" in the motor industry, brushless motors are the rising stars, and they are pouring into the high-precision control industry such as medical, industrial control, consumer electronics and automotive electronics. "Brushless" is not the future motor. The development trend of the industry? This article takes the case of a brushless motor in the form of a case! In recent years, brushless motors have been widely used in high-precision control industries such as medical, industrial control, consumer electronics and automotive electronics. The performance of brushless motors depends largely on the motor driver, the development stage, and how engineers can quickly use the oscilloscope. Convenient and realistic analysis of drive signals? This article mainly introduces the typical test and case analysis of the ZDS4054Plus digital excavation oscilloscope for the motor driver. With the development of power electronics and the emergence of new permanent magnet materials, brushless DC motors have been rapidly developed. Brushless DC motors have realized commutation of motors through electronic devices, replacing traditional mechanical brushes and commutators. It consists of a motor body and a driver and is a typical mechatronic product. The stator windings of the motor are mostly made into a three-phase symmetrical star connection, which is very similar to the three-phase asynchronous motor. A magnetized permanent magnet is adhered to the rotor of the motor, and a position sensor is mounted in the motor for detecting the polarity of the rotor of the motor. The driver is composed of power electronic devices and integrated circuits, and functions as: receiving start, stop, and brake signals of the motor to control start, stop, and brake of the motor; receiving position sensor signals and forward and reverse signals for controlling the inverse The power bridges of the transformers are turned on and off to generate continuous torque; the speed command and the speed feedback signal are accepted for controlling and adjusting the speed; providing protection and display. Brushless motors are widely used in medical, industrial control, consumer electronics, power tools, electric vehicles and other fields due to their low noise, long life, high speed, small size, good dynamic performance, large output torque and simple design. First, take a look at the block diagram of the brushless motor driver, as follows: As shown in the figure above, the MCU outputs only six PWM signals through the configuration register. The maximum voltage is only 5V. It cannot directly drive the motor. Instead, it controls the power tube to operate the motor. The driver circuit is usually composed of multiple MOSFETs. The drive axle and the motor drive axle power tube are formed. The commutation of the brushless motor is that the commutation is performed by detecting the position of the rotor. The sense driving method is to detect the rotor position by using the Hall sensor. The non-inductive driving method is to detect and calculate the current during the rotation of the brushless motor. The parameters such as voltage and voltage change, and the rotor position is estimated, and then commutation is performed. Commutation principle The brushless motor is internally equipped with a Hall sensor, which can give an output signal of 1 or 0 according to different magnetic field direction distributions at different positions of the rotor, and the three sensors are evenly installed, and occur 6 times at an electrical angle of 360 degrees. The flip level is 60 degrees electrical angle each time, and the position of the rotor is measured according to the signal coding of the three sensors. This is the commonly used sense drive mode. In addition, the non-inductive driving method is to detect and calculate the parameters such as current and voltage during the rotation of the brushless motor, and to estimate the rotor position, and then perform commutation. Driving circuit working principle Driving circuit simplified diagram In the figure, Q1 to Q6 are power FETs. When the AB phase is required to be turned on, only the Q1 and Q4 tubes need to be opened, and the other tubes are kept off. At this time, the flow path of the current is: positive → Q1 → coil A → winding B → Q4 → negative. The MCU gives the gate of Q1 a PWM signal, and the gate of Q4 is a normally open signal, so you can control the effective voltage of the drive motor by controlling the duty cycle of the PWM signal at the Q1 input. The same is true of the other five-step commutation. The measured phase waveforms are as follows: Actual phase voltage waveform measurement effect We can follow customers' drawings or design to make Customized wire
harness for various industries: game machine, ATM, POS machine, etc.
Customized
wire assembly with AVL components from original manufactures. Also
harness with local equivalent componets are workable with short L/T and
competitive price, also flexible MOQ.
Medical Wire Assemblies,Medical Alligator Clip Cable,Medical Diagnostic Cable,Medical Cable Assembly,Medical Wire Harness,Medical Cable ETOP WIREHARNESS LIMITED , http://www.oemmoldedcables.com
November 01, 2021