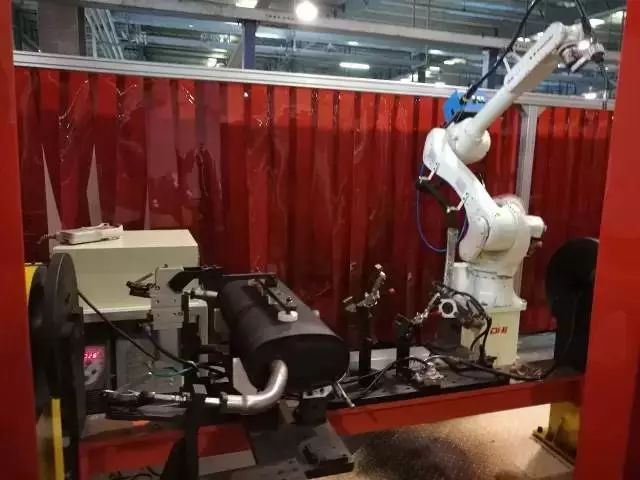
Usually after many companies or schools purchase welding robots, it is generally believed that all jobs can be done. I do not know if robots use friends to think about the premise, and it is also closely related to the quality of welding. From the very beginning, the dependence on robots is relatively large. , Slowly began to worry about the headaches of various problems during use. However, the first problem is that the user does not understand the device, but also can understand it will not operate, please study the following article, may be helpful to you! First, the welding robot welding usually appears some phenomenon Our common robotic welding is generally using carbon dioxide gas shielded welding. Welding defects occurring in the welding process generally include welding deviations, undercuts, and pores. The specific analysis is as follows: (1) The occurrence of welding misalignment may be due to an incorrect position of the welding or a problem when the torch is being searched. At this time, it is necessary to consider whether the TCP (the position of the center point of the welding torch) is accurate and adjust it. If this happens frequently, check the zero position of each axis of the robot and recalibrate it to correct it. (2) Undercut may occur due to improper welding parameter selection, welding torch angle or welding torch position. Adjust the power to adjust the welding parameters, adjust the position of the welding torch and the relative position of the welding torch and the workpiece. (3) Porosity may be caused by poor gas protection, excessive primer thickness of the workpiece, or insufficient dryness of the protective gas, which can be dealt with by appropriate adjustment. (4) Excessive splash may be caused by improper selection of welding parameters, reason of gas composition, or excessive elongation of welding wire. The size of the power may be properly adjusted to change the welding parameters, the gas proportioner may be adjusted to adjust the ratio of the mixed gas, and the welding torch may be adjusted. The relative position of the workpiece. (5) A crater is formed after cooling at the end of the weld, and the submerged arc crater function can be added to the work step during programming to fill it. Second, the welding robot common fault (1) Collisions occurred. This may be due to misalignment of the workpiece assembly or inaccurate TCP of the welding torch. Check the assembly condition or correct the torch TCP. (2) Arc fault occurs and arc cannot be triggered. This may be due to the fact that the wire does not come into contact with the workpiece or that the process parameters are too small. Manual wire feed may be used to adjust the distance between the torch and the weld, or to adjust the process parameters appropriately. (3) Protection gas monitoring alarm. There is a problem with the cooling water or protective gas supply. Check the cooling water or protective gas line. Third, the impact of welding workpiece welding robot At present, most welding robots adopt teaching programming and require that the assembly quality and accuracy of the workpiece must have good consistency. The application of welding robots should strictly control the quality of parts preparation and improve the accuracy of weldment assembly. Part surface quality, bevel size and assembly accuracy will affect the weld tracking effect. The following aspects can be used to improve the part preparation quality and weldment assembly accuracy. (1) Prepare a special welding process for welding robots. Strict process regulations are applied to the part dimensions, weld bevel, and assembly dimensions. General parts and groove size tolerance control in ± 0.8mm, assembly size error is controlled within ± 1.5mm, the occurrence of weld defects such as porosity and undercut welding defects can be greatly reduced. (2) Use high precision assembly tooling to improve the assembly accuracy of the weldment. (3) Welds shall be clean, free of oil, rust, welding slag, slag, etc., and weldable primers are allowed. Otherwise, it will affect the arc starting success rate. Tack welding is changed from welding rod welding to gas-shielded welding. At the same time, the spot welding site is polished to avoid slag husks or pores remaining in the tack welding, so as to avoid instability or even splashing of the arc. Fourth, robot welding positioner and fixture impact on the welding 1) The requirements for the positioning accuracy of the parts are higher, and the relative position accuracy of the welds is higher, and should be ≤ 1 mm. 2) Since the weldment is generally welded by a plurality of simple parts, the assembly and tack welding of these parts are performed in sequence on the welding jig. Therefore, their positioning and clamping are performed individually. . 3) The positioning of the robot welding fixture before and after the process must be consistent. 4) Robotic welding fixtures avoid the use of movable manual latches due to the large deflection angle of the positioner. 5) Robotic welding fixtures should use fast pressing parts as far as possible, and need to configure a perforated platform. In order to compact the fast clamps. 6) Different from ordinary welding jigs, robot welding fixtures can be welded on the front except the front side, and the side can also weld the workpiece and can be extended indefinitely. The above six points are the major differences between robotic fixtures and general fixtures, which have a direct impact on the quality of robotic welding. V. Effect of welding wire on welding robot welding process The robot can choose barrel or disk welding wire according to need. In order to reduce the frequency of replacing the welding wire, the robot should use the barrel welding wire. However, due to the use of barrel welding wire, the wire feeding hose is very long, the resistance is large, and the stiffness of the welding wire is required to be high. When the copper wire with slightly inferior copper plating quality is used, the copper plating on the surface of the wire may cause the inner volume of the catheter to decrease due to frictional shedding, and the resistance during the high speed wire feeding may increase. The welding wire may not be smoothly sent out, resulting in jitter and instability of the arc, affecting welding. Seam quality. In severe cases, jamming occurs and the robot is shut down. Therefore, the wire conduit must be promptly cleaned. Six, robot operators programming skills summary 1) Choose a reasonable programming welding sequence. The welding sequence is defined by reducing the welding distortion and the length of the welding torch travel path. 2) The space transition of the welding torch requires a short, smooth and safe movement path, and the collision gun cannot occur during the process. 3) Optimize welding parameters. In order to obtain the best welding parameters, work samples were made for welding tests and process evaluation. 4) Reasonable position of the positioner, position of the welding torch, position of the welding torch relative to the joint. After the workpiece is fixed on the positioner, if the weld is not the ideal position and angle, it is required to adjust the positioner continuously during programming, so that the welding seam is successively reached horizontal position according to the welding sequence. At the same time, it is necessary to constantly adjust the position of each axis of the robot. Reasonably determine the relative position of the welding torch, the angle and the length of the welding wire. After the position of the workpiece is determined, the position of the welding torch relative to the joint is observed by the programmer's eyes, making it difficult. This requires programmers to be good at summing up experience. 5) Insert the clear gun program in time. After the preparation of a certain length of welding procedure, the clear gun procedure should be inserted in time to prevent the welding spatter from blocking the welding nozzle and the contact tip, to ensure the cleaning of the welding torch, to improve the life of the nozzle, and to ensure reliable arc initiation and welding spatter reduction. 6) The establishment of the program is generally not one-step, in the process of robot welding constantly testing and modifying the program, adjust the welding parameters and the attitude of the gun, etc., will form a good program. VII. Impact of internal standard management on the use of equipment Strictly control the specification and operation flow of the robot operator, and enhance the maintenance of the welding process, which can reduce the average daily use quantity of consumables such as nozzles and contact nozzles. In addition, periodic inspection and maintenance of the robot system can effectively improve the service life of the components. High-quality managers, technicians, and operators are necessary conditions for robots to fully realize their efficiency. The quality of the use of a corporate welding robot is largely based on people (in fact, robot application engineers), so it is really important to ensure that there is a stable workforce. CL-2H Copper Connecting Terminals Our company specializes in the production and sales of all kinds of terminals, copper terminals, nose wire ears, cold pressed terminals, copper joints, but also according to customer requirements for customization and production, our raw materials are produced and sold by ourselves, we have their own raw materials processing plant, high purity T2 copper, quality and quantity, come to me to order it! CL-2H Copper Connecting Terminals Taixing Longyi Terminals Co.,Ltd. , https://www.longyicopperterminals.com



April 14, 2023